
Robotic greedy is a cornerstone process for automation and manipulation, important in domains spanning from industrial choosing to service and humanoid robotics. Regardless of many years of analysis, reaching sturdy, general-purpose 6-degree-of-freedom (6-DOF) greedy stays a difficult open drawback. Just lately, NVIDIA unveiled GraspGen, a novel diffusion-based grasp technology framework that guarantees to carry state-of-the-art (SOTA) efficiency with unprecedented flexibility, scalability, and real-world reliability.
The Greedy Problem and Motivation
Correct and dependable grasp technology in 3D area—the place grasp poses have to be expressed by way of place and orientation—requires algorithms that may generalize throughout unknown objects, numerous gripper sorts, and difficult environmental circumstances together with partial observations and muddle. Classical model-based grasp planners rely closely on exact object pose estimation or multi-view scans, making them impractical for in-the-wild settings. Knowledge-driven studying approaches present promise, however present strategies are likely to battle with generalization and scalability, particularly when shifting to new grippers or real-world cluttered environments.
One other limitation of many current greedy programs is their dependency on giant quantities of pricey real-world knowledge assortment or domain-specific tuning. Amassing and annotating actual grasp datasets is dear and doesn’t simply switch between gripper sorts or scene complexities.
Key Concept: Giant-Scale Simulation and Diffusion Mannequin Generative Greedy
NVIDIA’s GraspGen pivots away from costly real-world knowledge assortment in direction of leveraging large-scale artificial knowledge technology in simulation—notably using the huge range of object meshes from the Objaverse dataset (over 8,000 objects) and simulated gripper interactions (over 53 million grasps generated).
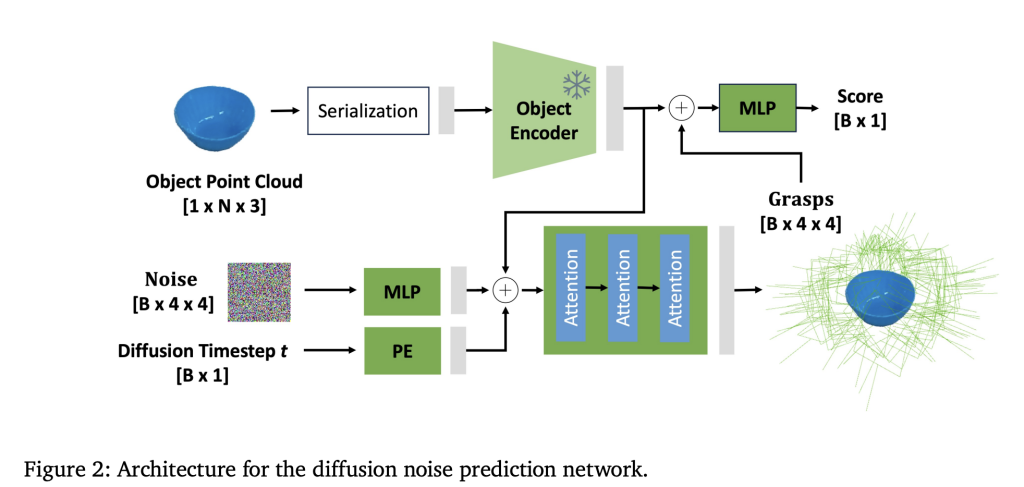
GraspGen formulates grasp technology as a denoising diffusion probabilistic mannequin (DDPM) working on the SE(3) pose area (comprising 3D rotations and translations). Diffusion fashions, well-established in picture technology, iteratively refine random noise samples in direction of practical grasp poses conditioned on an object-centric level cloud illustration. This generative modeling method naturally captures the multi-modal distribution of legitimate grasps on advanced objects, enabling spatial range important for dealing with muddle and process constraints.
Architecting GraspGen: Diffusion Transformer and On-Generator Coaching
- Diffusion Transformer Encoder: GraspGen employs a novel structure combining a robust PointTransformerV3 (PTv3) spine to encode uncooked, unstructured 3D level cloud inputs into latent representations, adopted by iterative diffusion steps that predict noise residuals within the grasp pose area. This differs from prior works that depend on PointNet++ or contact-based grasp representations, delivering improved grasp high quality and computational effectivity.
- On-Generator Coaching of Discriminator: GraspGen innovates on the grasp scorer or discriminator coaching paradigm. As an alternative of coaching on static offline datasets of profitable/failed grasps, the discriminator learns on “on-generator” samples—grasp poses produced by the diffusion generative mannequin throughout coaching. These on-generator grasps expose the discriminator to typical errors or mannequin biases, comparable to grasps barely in collision or outliers removed from object surfaces, enabling it to higher determine and filter false positives throughout inference.
- Environment friendly Weight Sharing: The discriminator reuses the frozen object encoder from the diffusion generator, requiring solely a light-weight multilayer perceptron (MLP) skilled from scratch for grasp success classification. This results in a 21x discount in reminiscence consumption in comparison with prior discriminator architectures.
- Translation Normalization & Rotation Representations: To optimize community efficiency, the interpretation elements of grasps are normalized based mostly on dataset statistics, and rotations encoded by way of Lie algebra or 6D representations, guaranteeing steady and correct pose prediction.
Multi-Embodiment Greedy and Environmental Flexibility
GraspGen is demonstrated throughout three gripper sorts:
- Parallel-jaw grippers (Franka Panda, Robotiq-2F-140)
- Suction grippers (modeled analytically)
- Multi-fingered grippers (deliberate future extensions)
Crucially, the framework generalizes to:
- Partial vs. Full Level Clouds: It performs robustly on each single viewpoint observations with occlusions in addition to fused multi-view level clouds.
- Single Objects and Cluttered Scenes: Analysis on FetchBench, a difficult cluttered greedy benchmark, confirmed GraspGen reaching prime process and grasp success charges.
- Sim-to-Actual Switch: Skilled purely in simulation, GraspGen exhibited robust zero-shot switch to actual robotic platforms underneath noisy visible inputs, aided by augmentations simulating segmentation and sensor noise.
Benchmarking and Efficiency
- FetchBench Benchmark: In simulation evaluations overlaying 100 numerous cluttered scenes and over 6,000 grasp makes an attempt, GraspGen outperformed state-of-the-art baselines like Contact-GraspNet and M2T2 by huge margins (process success enchancment of practically 17% over Contact-GraspNet). Even an oracle planner with ground-truth grasp poses struggled to push process success past 49%, highlighting the problem.
- Precision-Protection Beneficial properties: On normal benchmarks (ACRONYM dataset), GraspGen considerably improved grasp success precision and spatial protection in comparison with prior diffusion and contact-point fashions, demonstrating larger range and high quality of grasp proposals.
- Actual Robotic Experiments: Utilizing a UR10 robotic with RealSense depth sensing, GraspGen achieved 81.3% general grasp success in varied real-world settings (together with muddle, baskets, cabinets), exceeding M2T2 by 28%. It generated targeted grasp poses solely on course objects, avoiding spurious grasps seen in scene-centric fashions.

Dataset Launch and Open Supply
NVIDIA launched the GraspGen dataset publicly to foster neighborhood progress. It consists of roughly 53 million simulated grasps throughout 8,515 object meshes licensed underneath permissive Artistic Commons insurance policies. The dataset was generated utilizing NVIDIA Isaac Sim with detailed physics-based grasp success labeling, together with shaking checks for stability.
Alongside the dataset, the GraspGen codebase and pretrained fashions can be found underneath open-source licenses at https://github.com/NVlabs/GraspGen, with further venture materials at https://graspgen.github.io/.
Conclusion
GraspGen represents a significant advance in 6-DOF robotic greedy, introducing a diffusion-based generative framework that outperforms prior strategies whereas scaling throughout a number of grippers, scene complexities, and observability circumstances. Its novel on-generator coaching recipe for grasp scoring decisively improves filtering of mannequin errors, resulting in dramatic positive aspects in grasp success and task-level efficiency each in simulation and on actual robots.
By publicly releasing each code and a large artificial grasp dataset, NVIDIA empowers the robotics neighborhood to additional develop and apply these improvements. The GraspGen framework consolidates simulation, studying, and modular robotics elements right into a turnkey resolution, advancing the imaginative and prescient of dependable, real-world robotic greedy as a broadly relevant foundational constructing block in general-purpose robotic manipulation.
Take a look at the Paper, Challenge and GitHub Web page. All credit score for this analysis goes to the researchers of this venture. SUBSCRIBE NOW to our AI Publication

Michal Sutter is a knowledge science skilled with a Grasp of Science in Knowledge Science from the College of Padova. With a stable basis in statistical evaluation, machine studying, and knowledge engineering, Michal excels at remodeling advanced datasets into actionable insights.


